RobotStudio

Tendo em vista que a célula de manufatura deve produzir diversos tipos de subprodutos, para cada lote produzido tanto a matéria prima quanto a peça manufaturada apresentam uma geometria diferente, dessa forma para cada geometria o robô deve executar uma rotina diferente obedecendo o posicionamento de cada peça, para suprir essa necessidade optou-se pelo software RobotStudio, da fabricante ABB (acrónimo de Asea Brown Boveri), a mesma fabricante do robô, que permite uma simulação da rotina de trabalho do braço robótico bem como sua programação.
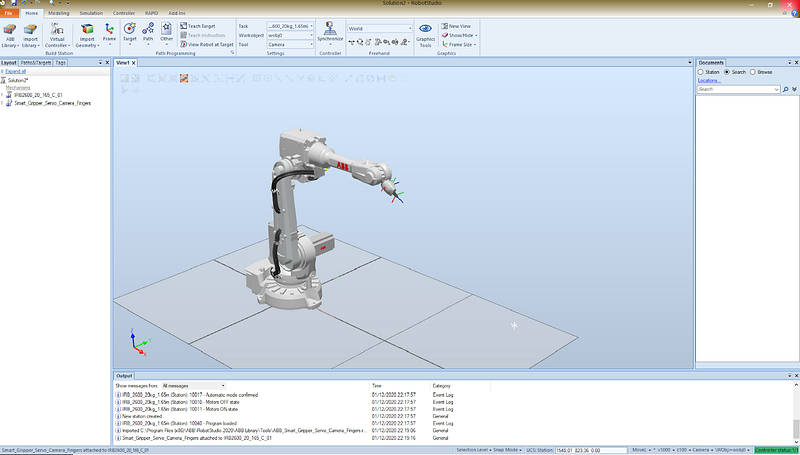
O robô em questão consiste em um braço antropomórfico com 6 graus de liberdade sendo 3 para posicionamento e 3 para orientação, onde o RobotStudio já possui um banco de dados com o modelo selecionado. O software é capaz de gerar a rotina do robô recebendo os valores de referência de posicionamento e orientação espacial da peça e das coordenadas da base do mesmo, gerando o melhor caminho possível para o posicionamento, empregando uma programação off-line o controle de qualidade apresenta uma maior robustez e qualidade, podendo ainda ser facilmente replicada para outras células.
Esse método garante uma precisão de posicionamento elevada, um alto índice de repetibilidade, algo extremamente vantajoso em um processo contínuo de produção.
Gabriel Garbugio da Silva


Comentários
Postar um comentário